News
JLCPCB様よりサーボ駆動基板、MD駆動基板、緊急停止用基板、DCDCコンバータ基板制作費のご支援をいただきました!
2026.06.01

NHK学生ロボコン2026にさきがけて、JLCPCB様より基板制作費のご支援をいただきました! ※この記事には、一部宣伝・広告に類する内容が含まれております。
NHK学生ロボコン2026に向けて支援をいただきました!
今回製作した基板とその説明
今回、JLCPCB様のご支援を受けて製作した基板は以下の7つです。
- サーボモータ用基板: SerVario-Node_v0.1
- MD駆動基板: Sparkle-v2
- 降圧基板: DCDCコンバータ基板
- 緊急停止ボタン基板: emergency_button
- 緊急停止リレー基板: emergency_relay
- 遠隔緊急停止基板: remote_emergency_stop_ver2
- 遠隔緊急停止信号送信基板: remote_emergency_stop_send_ver2
これらの基板の機能について簡単に紹介します。
サーボモータ用基板: SerVario-Node_v0.1

機能概要
- PWMによりRCサーボモータを制御
- サーボモータの電源電圧を可変
- CAN通信により出力電圧および角度を設定
- スイッチでCAN IDを指定可能
- 7セグによって出力電圧・CAN IDを表示
主要部品
- MCU: STM32H533RET6
- サーボ電源用IC: BD9E302EFJ
- ロジック電源用IC: BD9G102G-LB、BU33SD5WG
- CANトランシーバ: BD41044FJ
MD駆動基板: Sparkle-v2
この基板は、3月に作成したブラシ付きモーター用のモータードライバを制御する基板「Sparkle」の改良版であり、前回発生した問題点を改善しつつ、必要最低限の機能に絞って設計したものです。 主な変更点としては、MCUの書き込みモードを自動で変更する機能を削除したことに加え、電源の降圧時発生する熱への耐性を強化した点が挙げられます。

また、機能の詳細を以下にまとめます。
機能概要
- CANにより出力指令を送受信
- 上部に取り付けたモータードライバに信号を出力
主要部品
- MCU: STM32H533RET6
- CANトランシーバ: BD41044FJ
その他構成要素
- USB Type-Cポート
- エンコーダ読み取り用ポート
降圧基板: DCDCコンバータ基板
DCDCコンバータ基板の増産を依頼しました。 このDCDCコンバータ基板は12V~24Vを5Vへ降圧する基板です。

緊急停止
遠隔で緊急停止スイッチを押すための送信基板と受信基板です.


緊急停止スイッチを新調したので,それに付随する基板です.

JLCPCB様でのPCBAの発注方法
発注方法はNHK2024でのご支援の記事と同じ内容です 設定で時間がかかるものと思っていましたが、Kicadだとプラグインで簡単に出来ました。 私が今回発注に使用したファイルは以下の手順で生成しています。 (使用環境 Windows11 Kicad9)
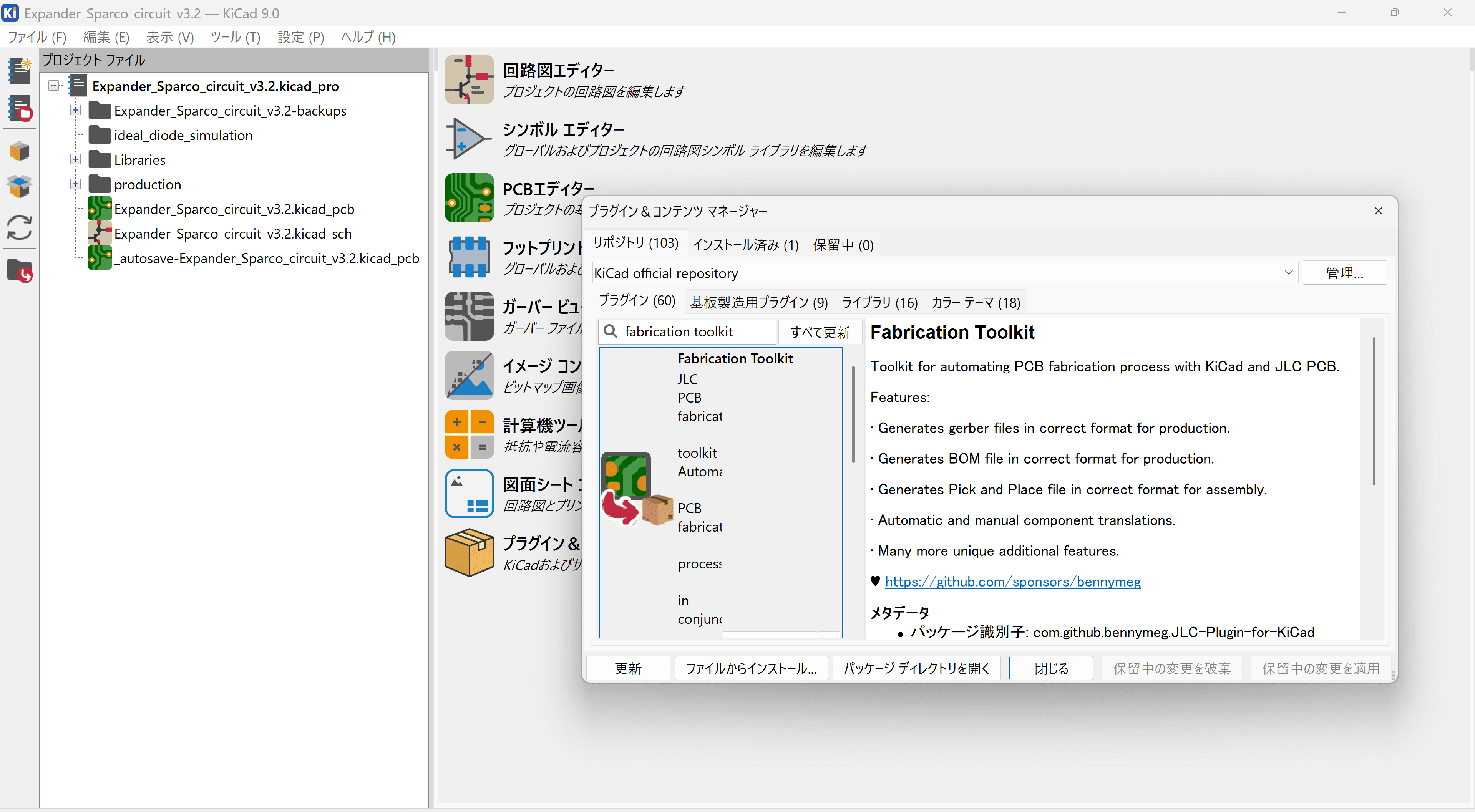
1. プラグイン導入
プラグイン&コンテンツ マネージャーから「Fabrication Toolkit」を選択してインストール
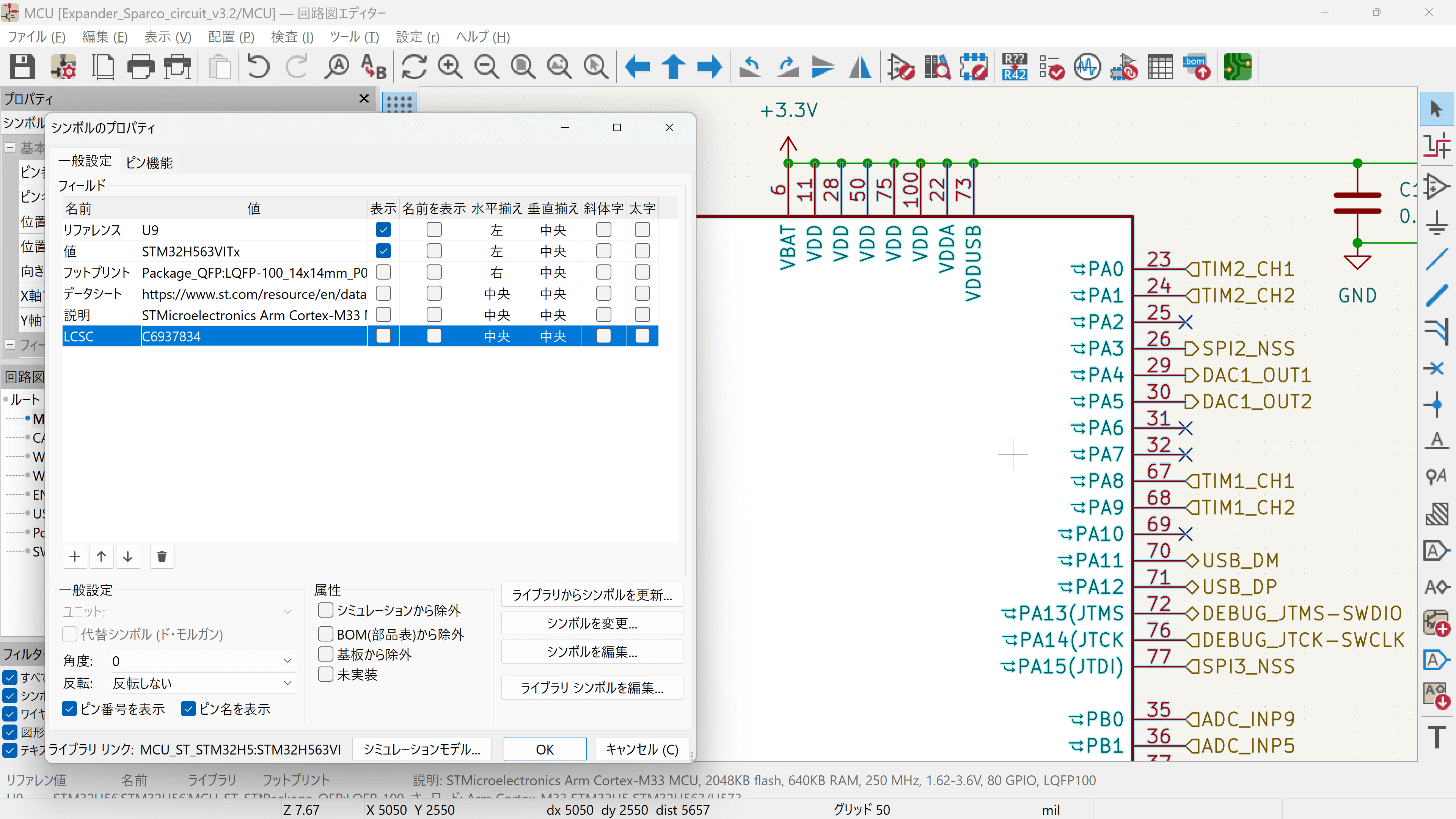
2. 素子選択
以下のURLから素子を選定し、KiCadの回路図シンボルのフィールドにLCSCという欄を追加して、値に選定した素子のコードを入力する。 「JLCPCBの素子リストURL」
※LCSCという欄を作りコードを入力しなくても、ファイル生成時に抵抗やコンデンサ等だと予測して出力してくれるみたいですが、たまに違うことや、実装に値段がかかる素子の場合もあるので注意が必要です。
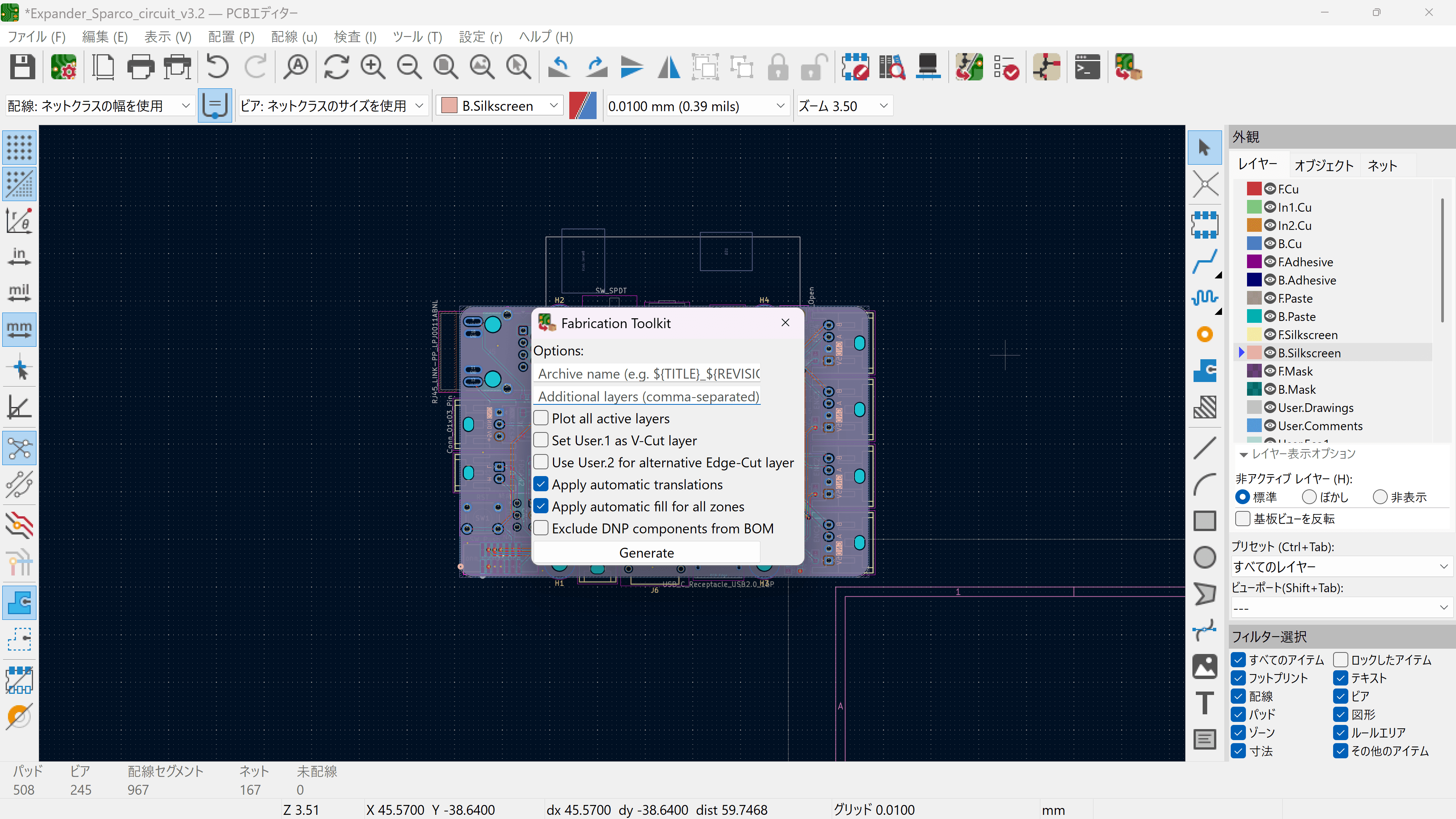
3. ファイル生成
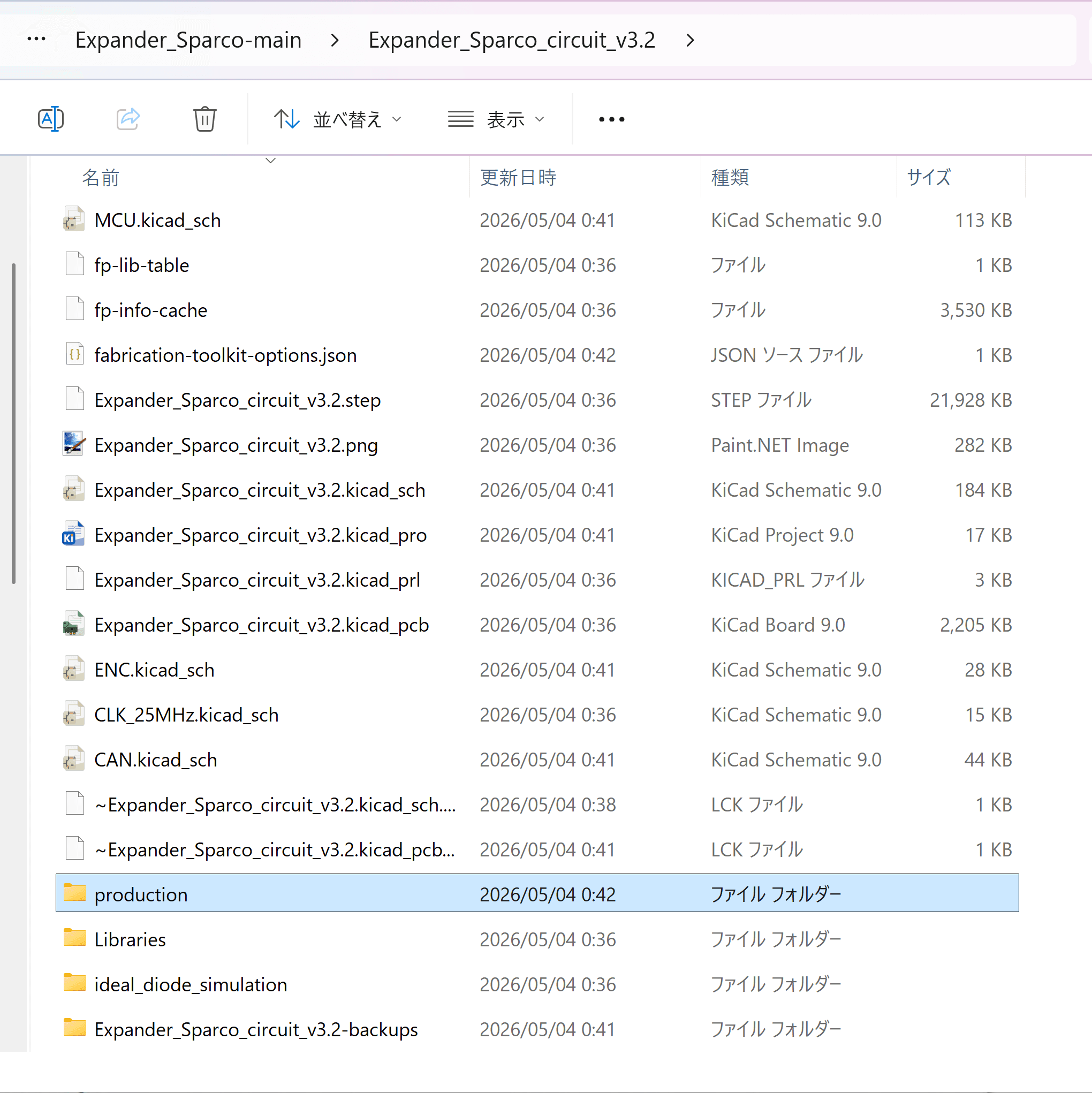
追加したプラグインのGenerateを選択。 →追加した素子のコードによって自動的に素子の位置情報などのファイルを勝手に生成してくれます。
上のようにディレクトリ直下にフォルダが生成されその中に発注に必要なファイルがすべて入っています。
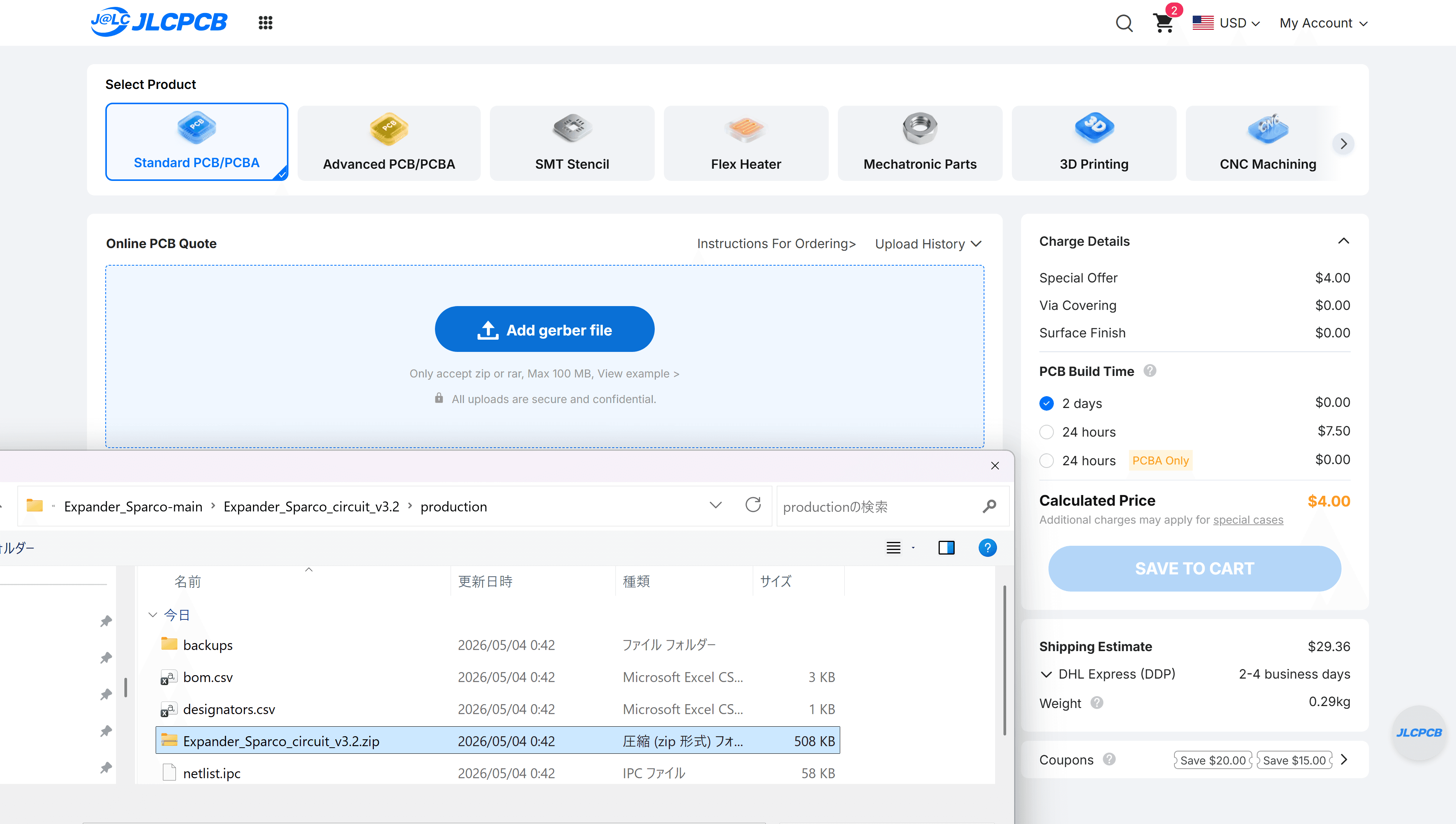
4. 基板データのアップロード
ここからはJLCPCBの発注画面での操作です。通常の基板通り、Gerberデータとドリルデータのファイルをまとめたzipファイルをアップロードします。 →実はこのzipファイルも、先の手順で行った「production」のフォルダ下に生成されています。(設定とか忘れることがないので、とても楽ですね)
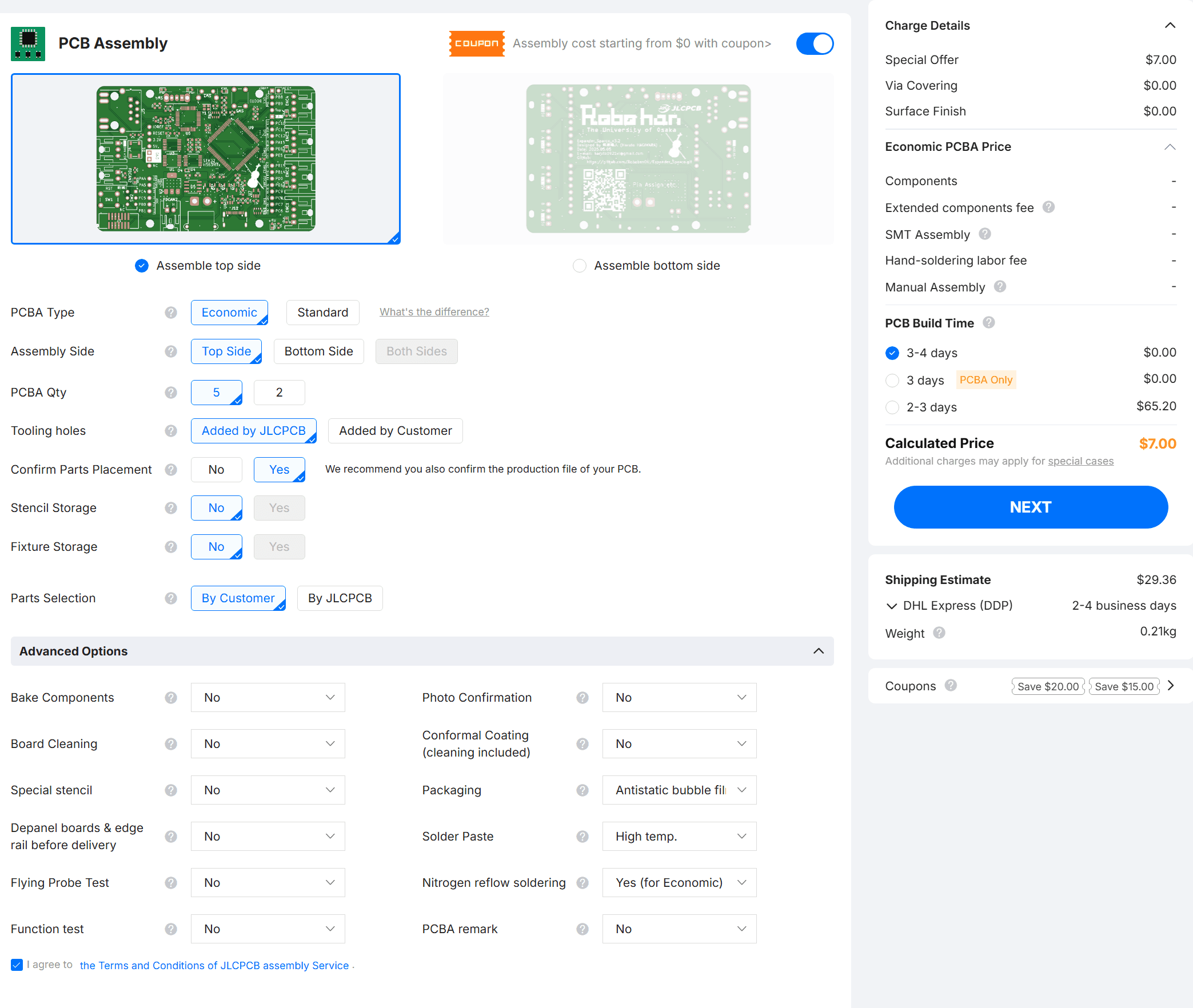
5.PCBAのオプションを設定
PCB Assemblyを有効にして、「実装面(Assembly Side)」、「実装する枚数(PCBA Qty)」、「実装後のズレの確認(Confirm Parts Placement)」に関して確認します。 (最後のはオプションなので、デフォルトでは無効になっていますが、ほぼ値段変わらないので、今回は有効にしています。) 上記の設定が終われば「Confirm」をクリックして実装する部品などのデータを上げていきます。
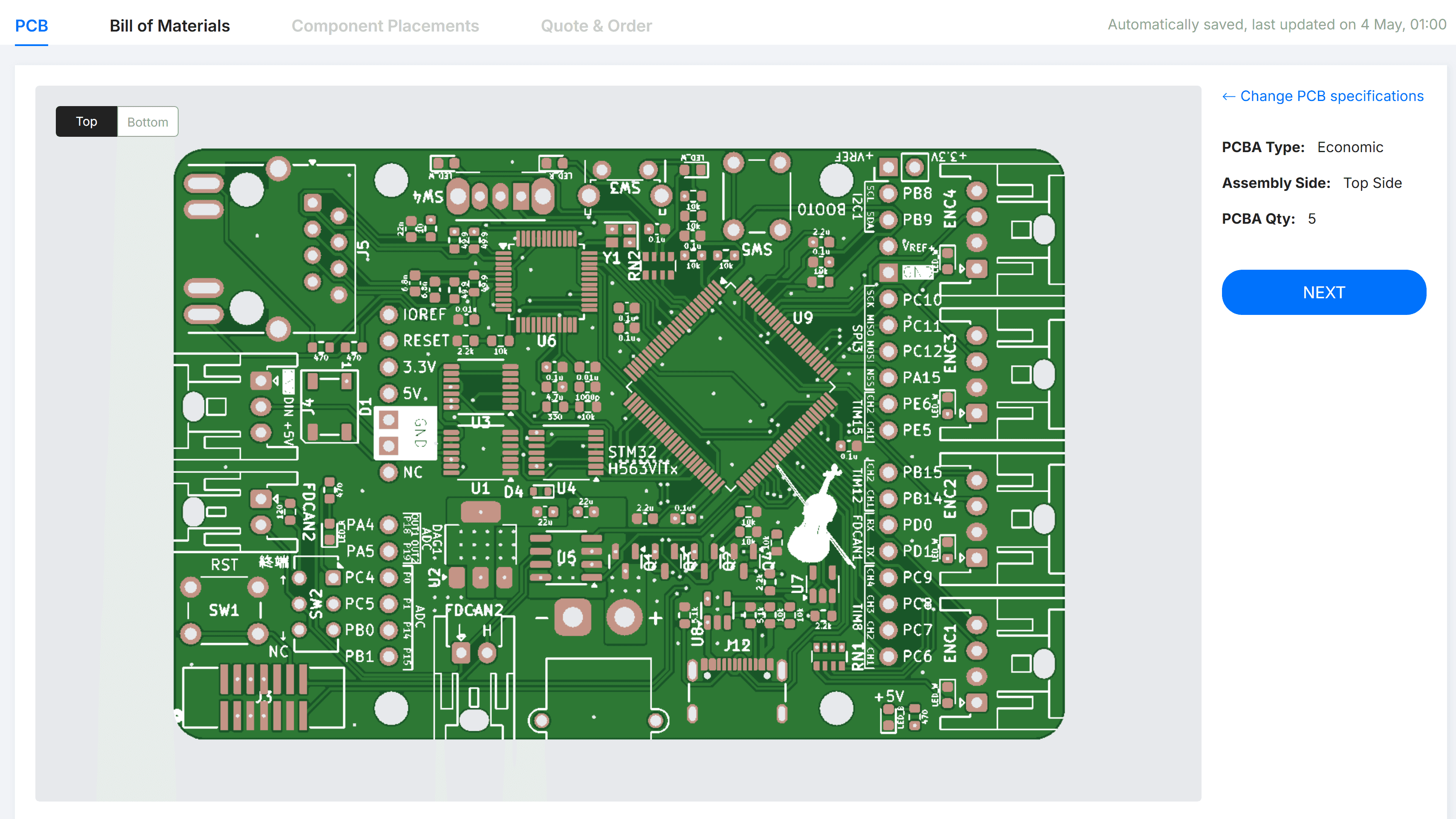
6. PCBAに関するデータをアップロード
最初は先の選択内容に関して表示されているだけなので、問題がなければ「Next」を押してスルーします。
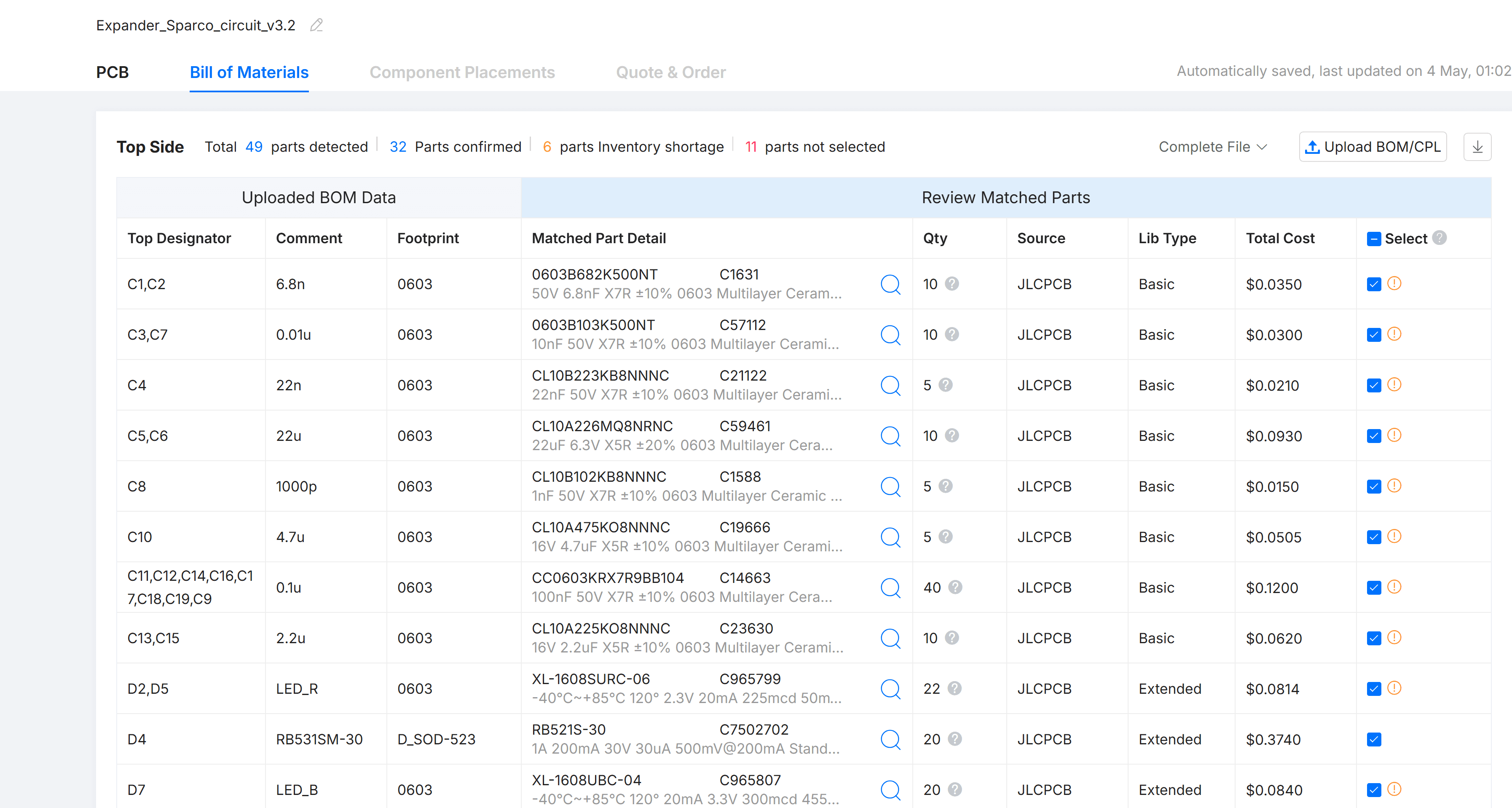
次に、「部品のデータ(BOM File)」と「部品の位置(CPL File)」を上げます。 →このデータに関しても「production」フォルダ下にそれぞれ「bom.csv」と「positions.csv」という形で生成されています。
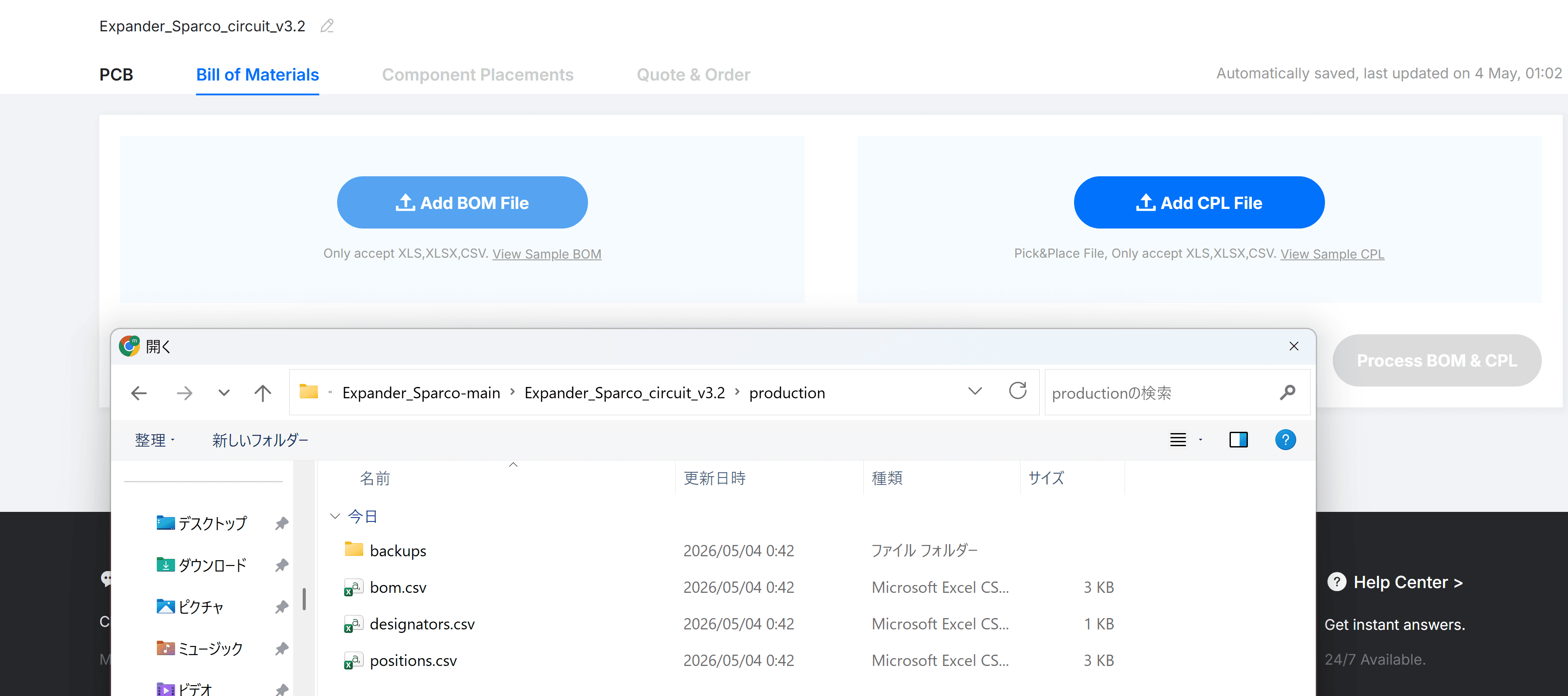
データを上げた後はそのデータが正しいかの確認です。 基本的に先の、回路図での設定で上げた「LCSC」という欄に正しいコードを入れていれば問題はありません。
* 今回の方法では、「LCSCの欄がない」または、「LCSCの欄が無入力」の場合には、プラグインが素子を推測して、先のcsvファイルを生成することがあります。 その場合には、右側の「Select」のチェックを外すか、「Matched Part Detail」の検索ボタンで素子を変更することが出来ます。
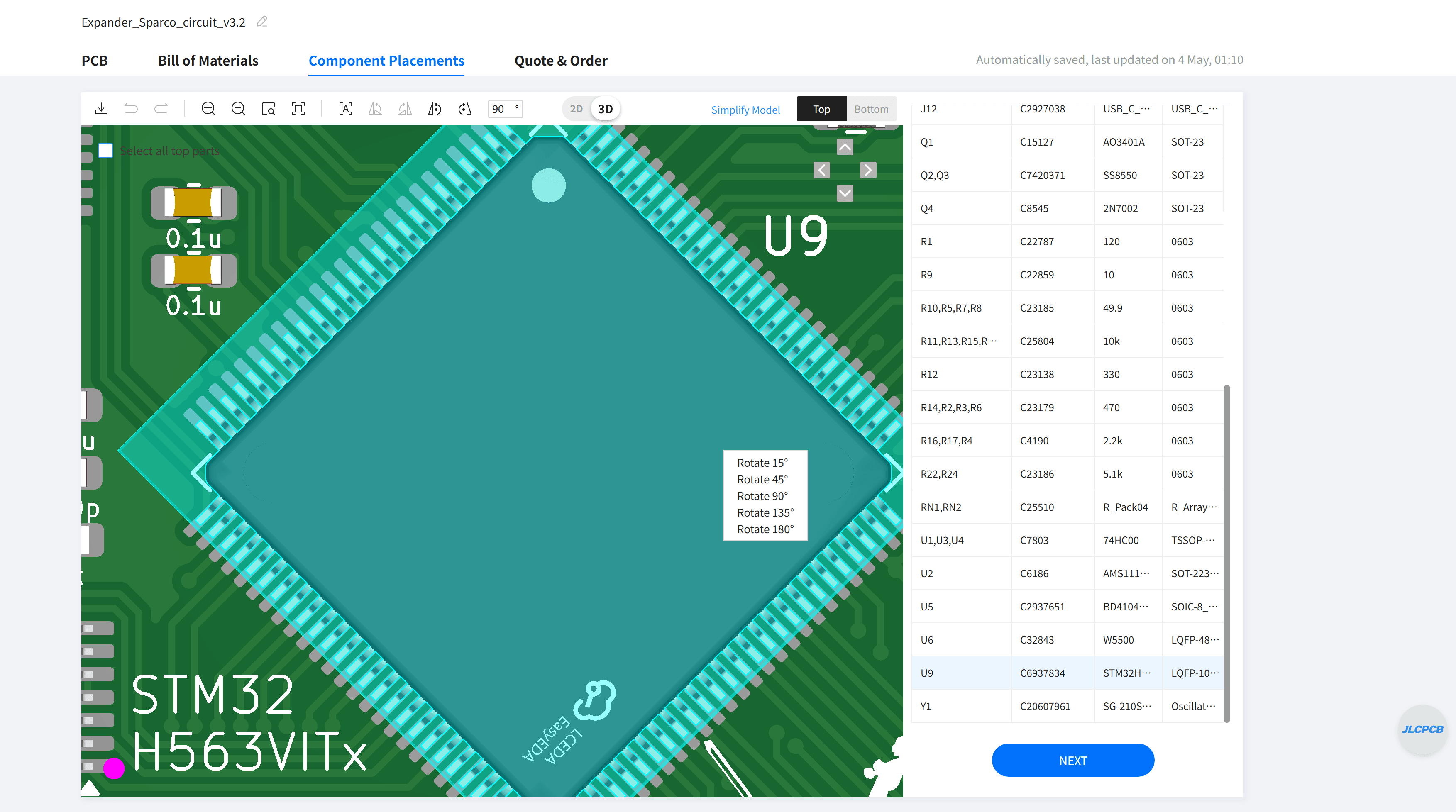
7. パーツの位置データの確認
最後に、先に確定させたパーツの位置データを確認します。 ここはしっかり確認しましょう。 フットプリントのデータは基本的に素子リストにある「Easy EDAのライブラリ」を使用しない限り、向きが異なる場合が多々あります。 向きが異なる場合、素子は以下のように個別に向きを変更することが出来ます。
素子の数が多い場合は、フットプリントを作る段階で ・「Easy EDA」から「Kicad」用のデータに変換 ・「Easy EDAのライブラリ」を参考に向きを調整 上のどちらかを行っていれば、一つ一つ変更する手間がなく、楽にこのステップを終えることが出来ます。
8. 最後に
以上でPCBAまでの設定が終わり、カートに入っていると思います。 あとは「配送方法」や「支払方法」を選択して発注をかけましょう。
プラグインを使用することで、「基板を初めて発注する方」、「PCBAを利用しない方」も含めて、ボタン一つで必要なファイルがすべて生成され、とても簡単に発注が行えると思います。 この記事が、基板を発注する手助けになれば幸いです。
おわりに
最後になりますがRobohanの活動に対して支援してくださっているJLCPCB様に多大なる感謝申し上げます。約1か月後に控えたNHK学生ロボコン2026に向けて、引き続き開発を進めてまいります。これからもよろしくお願いいたします。
支援していただいたJLCPCB様、本当にありがとうございます。